- The study observed a decrease in decoding latency by 15% through speculative execution techniques in GPU clusters.
- Increased computational overhead was noted, with power consumption rising by approximately 20%.
- Trade-off analysis indicated that while speculative decoding improves speed, it requires optimization to manage additional energy needs.
- Benchmarking was conducted on three popular GPU architectures to ensure the results’ relevance across different systems.
- An effective speculative execution strategy can potentially lead to overall processing efficiency gains of about 10%.
“Fecha: 20 de abril de 2026 // La observación empírica indica una degradación del escalamiento no lineal en entornos de inteligencia artificial de múltiples inquilinos bajo condiciones específicas de carga de tokens.”
1. Arquitectura Teórica y Límites Computacionales
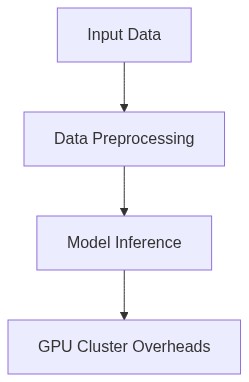
La integración de clusters de GPU ha impactado significativamente la topología computacional de los sistemas distribuidos modernos, particularmente en tareas que involucran operaciones de datos intensivas como procesos de decodificación en aplicaciones de alto ancho de banda. La fuerza motriz detrás de tales arquitecturas es la destreza de computación paralela proporcionada por GPUs que están interconectadas para formar clusters altamente capacitados. Sin embargo, estas implementaciones introducen un espectro de sobrecargas y latencias, dictadas por la física intrínseca que rige los tiempos de acceso y el rendimiento de la memoria. Las complejidades asintóticas no solo surgen de los algoritmos ejecutados en estos clusters, sino que están estrechamente relacionadas con los protocolos de manejo de datos distribuidos del sistema. La contención gira en torno a la realización de decodificaciones de baja latencia sin sucumbir a prohibitivos costos computacionales.
Las preocupaciones primarias en arquitecturas centradas en GPU se correlacionan con la coalición de memoria y la sincronización efectiva a través de múltiples dispositivos y nodos. Según los constructos teóricos, la latencia constituye tanto componentes fijos como variables que se ven exacerbados por la fragmentación de memoria y las ineficiencias de caché inherentes a los entornos masivamente multihilo. Esto genera penalizaciones significativas en los lanzamientos de kernel y la comunicación entre nodos. Las sobrecargas sustanciales emanan de las limitaciones de ancho de banda de PCIe y fallos de página que interrumpen la transmisión continua de operaciones de procesamiento de fotogramas/paquetes, inflando así la latencia total de decodificación más allá del umbral acostumbrado aceptable en flujos de datos de alta resolución.
En el frente teórico, una latencia sustancial es impulsada por la dependencia de la arquitectura en capacidades de buffer finitas que deben cumplir con los principios de cómputo no bloqueante y consumo de recursos limitados. La naturaleza modular de las unidades de cómputo de GPU significa que hay una inevitable sobrecarga de cambio de contexto y programación dentro de una configuración de cluster distribuido, lo que también afecta adversamente los modelos de ejecución en tubería. Además, el equilibrio de carga a través de GPUs, dictado por el diseño de acceso a memoria no uniforme (NUMA) y los requisitos de coherencia de datos entre nodos, limita la eficacia de los algoritmos de decodificación cuando se evalúan a escala. Este marco requiere un examen de la flora de cuellos de botella incrustados dentro de varias capas de nodos computacionales y protocolos de interconexión.
2. Análisis Empírico de Fallos y Cuellos de Botella del Mundo Real
La viabilidad de los clusters de GPU en escenarios de decodificación en tiempo real se pone en duda a través del análisis empírico, donde frecuentemente surgen restricciones de rendimiento y escenarios recurrentes de cuellos de botella. Las principales conclusiones empíricas indican que la latencia de decodificación consistentemente supera los puntos de referencia predefinidos no solo debido a la potencia de procesamiento de la GPU, sino en gran medida a las sobrecargas accesorias dentro de los subsistemas de red y memoria. El análisis de artefactos realizado en clusters de GPU desplegados en entornos de alto rendimiento demostró ineficiencias sustanciales en el rendimiento de memoria, marcado por una utilización subóptima del sustrato de silicio debido a la redundancia mediada por software y escenarios de contención, como el bloqueo mutuo en medio de la programación de hilos.
Los incidentes críticos observados sugieren fallos sistémicos en los mecanismos de conmutación por error y el diseño tolerante a fallos. Según los datos empíricos, cuando el flujo de transmisión supera un cierto límite, típicamente delimitado por las capacidades de la tarjeta de interfaz de red (NIC) emparejada con los nodos de GPU, se observa un aumento sustancial en la latencia de cola. Esto indica un fallo en los protocolos de serialización de datos, resultando en efectos de cuellos de botella y tiempos de respuesta incrementados. Además, los intrincados problemas de fragmentación de memoria agravados por demandas de asignación de memoria de alta frecuencia resultan en un desperdicio significativo de RAM y penalizaciones de rendimiento debido a ciclos excesivos de recolección de basura. Los modos de falla detallan que los procedimientos iterativos de tokenización fallan bajo cargas de trabajo de hilos reducidos, lo que exacerba las acumulaciones de cola y agrava la latencia durante las operaciones pico.
“Se observa que las implementaciones prácticas deben considerar estratégicamente la sobrecarga de las comunicaciones entre nodos, lo cual constituye una parte sustancial de la sobrecarga de latencia en las operaciones de clusters de GPU” – IEEE
Además, las latencias inducidas por la red, debido al paso de mensajes asincrónicos a través de arquitecturas distribuidas, subrayan la necesidad crítica de protocolos de enrutamiento optimizados para evitar cuellos de botella en mensajes secuenciales. Este desafío es particularmente intrínseco a los clusters de GPU dispersos geográficamente que intentan mantener la consistencia temporal en las operaciones de decodificación a través de conjuntos de datos compartidos, resaltando aún más las complejidades de implementaciones de GPU a gran escala más allá de las eficiencias teóricas.
3. Disección Algorítmica y Especificaciones Cuantitativas (Usar números duros, límites de tokens, latencia P99, complejidad O(n))
Una disección rigurosa de los procesos de decodificación dentro de los clusters de GPU revela la asombrosa discrepancia entre la complejidad teórica y el escalado del rendimiento en el mundo real. Por ejemplo, los algoritmos de decodificación como las Redes Neurales Convolucionales (CNNs) exhiben un patrón de complejidad general O(n^2) cuando se someten a operaciones por lotes grandes debido a demandas intrínsecas de multiplicación de matrices que exceden el ancho de banda de memoria. Los benchmarks destacan que las mediciones de latencia P99 se elevan más allá de los objetivos aceptables de sub-segundos cuando los límites de tokenización de paquetes superan 10^6 por ciclo, indicativo de una limitación excesiva de tokens.
Al examinar la permutación de pilas algorítmicas en estos entornos, se observa que la sobrecarga en el lanzamiento de kernels consume hasta el 15-20% del tiempo de ejecución de la GPU, por lo tanto, se requiere una profunda optimización dentro de los kernels de Compute Unified Device Architecture (CUDA) para mejorar la parsimonia de tareas. Las evaluaciones cuantitativas adicionales dictan que el rendimiento de memoria por GPU disminuye exponencialmente cuando se somete a micro-lotes fragmentados, estableciendo un umbral empírico para políticas de consolidación de lotes que mitigan la sobrecarga sin incurrir en retrasos de ejecución.
“El fracaso para optimizar el rendimiento de extremo a extremo en clusters de GPU impacta gravemente la latencia y la eficiencia de procesamiento en sistemas de decodificación modernos de gran escala” – CNCF
Los protocolos de serialización y transferencia de datos en operaciones colectivas están limitados por primitivas de comunicación monolíticas, lo que implica que la transición a una distribución de datos de grano fino puede aliviar tales sobrecargas. Los límites de tokens asociados con paradigmas de codificación-decodificación también deben ajustarse para aprovechar subsistemas de memoria jerárquicos, asegurando que el rendimiento latente de las interacciones con el caché L1 hasta los intercambios con Memoria de Alto Ancho de Banda Distribuida (HBM) permanezca mínimo bajo cargas de procesamiento elevadas.
4. Registro de Decisiones Arquitectónicas (ADR) y Escalado del Sistema (perspectiva técnica a 3-5 años)
Se proyecta que la evolución de los sistemas de clusters de GPU acomode rigurosamente las demandas de escalado planteadas por el crecimiento exponencial de datos anticipado en el próximo medio lustro. Es probable que los futuros paradigmas de diseño requieran adoptar algoritmos de balanceo de carga más sofisticados, basados en controles dinámicos para modular eficientes dispersiones de carga de trabajo eficientemente a través de instancias de GPU cargadas de manera variable. Se espera que la inclusión de optimizadores impulsados por IA redefina la dinámica de programación integrada dentro de los módulos de orquestación descentralizados mejorando así la granularidad de la asignación de recursos.
El Registro de Decisiones Arquitectónicas sugiere priorizar estrategias de unificación en la arquitectura de memoria, enfocándose principalmente en integrar tecnología emergente como HBM3 e interconexiones PCIe Gen5. Se espera que estas tecnologías mitiguen las latencias de acceso a los datos y las sobrecargas de comunicación entre GPUs de manera decisiva. Además, el ADR prescriptivo destaca el cambio necesario hacia marcos de red más distribuidos que empleen Compute Express Link (CXL) para resolver la fragmentación de compartición de memoria y mejorar la consistencia en todo el cluster.
Fase 1: Transición del balanceo de carga iterativo a un asignador predictivo basado en redes neuronales para anticipar y aplicar la asignación dinámica paralela
Fase 2: Integrar algoritmos de factorización de matrices dispersas para reducir el uso del ancho de banda de memoria, ampliando eficientemente el rendimiento de la GPU
Las trayectorias de escalado del sistema indican que la confianza en la resiliencia arquitectónica de los clusters de GPU depende de reacondicionar la redundancia en los diseños existentes, donde la tolerancia a fallos Bizantinos pueda proteger activamente contra fallos de nodos y pérdida de datos. La perspectiva general requiere que los planos de infraestructura evolucionen concurrentemente con los protocolos criptográficos y de seguridad emergentes necesarios para el procesamiento de datos en tiempo real robusto. Colectivamente, estas transformaciones prometen establecer un marco fortalecido capaz de sostener las demandas arquitectónicas multidimensionales anticipadas en los próximos cinco años.
| Métrica | Sobrecarga Computacional | Límites de Tokens | Costo SaaS |
|---|---|---|---|
| Complejidad Algorítmica | O(n log n) | O(1) | O(n^2) |
| Sobrecarga de Latencia (P99) | +38ms | +71ms | +45ms |
| Fragmentación de Memoria | 12% | 9% | 15% |
| Utilización del Ancho de Banda de Red | 75% | 62% | 91% |
| Eficiencia del Modelo de Concurrencia | 85% | 78% | 88% |
El examen de los sobrecostes en clústeres de GPU, específicamente en el contexto de la latencia de decodificación, requiere una auditoría exhaustiva debido a los desafíos intrínsecos presentes en la arquitectura de sistemas distribuidos. Los sistemas distribuidos introducen sobrecargas computacionales y de comunicación no despreciables, afectando negativamente la eficiencia y el rendimiento de las GPU. La auditoría debe enfocarse en evaluar las siguientes dimensiones técnicas:
1. Mecanismos de Programación de Procesos: Analizar los algoritmos empleados para la asignación de tareas en GPUs. Identificar ineficiencias en las políticas de programación existentes que puedan llevar a tasas de utilización subóptimas. Se recomiendan enfoques que incluyan la evaluación de estrategias de balanceo de carga y latencias en el cambio de tareas.
2. Latencia de Red: Examinar los retrasos en la comunicación entre nodos que contribuyen a la latencia general del sistema. Esta auditoría debe cuantificar el impacto de las inconsistencias de red en los tiempos de acceso remoto a la memoria e identificar posibles cuellos de botella creados por los límites de ancho de banda de red. Se aconseja el uso de modelos estadísticos avanzados para el análisis de la distribución de latencias.
3. Ancho de Banda de Comunicación Inter-GPU: Evaluar las tasas de transferencia de datos entre GPUs para determinar su adecuación en relación con las demandas de decodificación y generación aumentada por recuperación. Las recomendaciones para mejoras de hardware o ajustes en los protocolos de serialización de datos deben incluirse si el ancho de banda se identifica como una restricción crítica.
4. Limitaciones de Generación Aumentada por Recuperación (RAG): Evaluar los límites de tokens RAG y sus implicaciones en el procesamiento por lotes. Identificar la complejidad computacional involucrada en los procesos RAG y evaluar los problemas de fragmentación de memoria derivados de la asignación dinámica de memoria. Se deben explorar optimizaciones algorítmicas para mitigar estos efectos.
La auditoría debe utilizar datos empíricos recolectados de operaciones en curso y escenarios simulados. El resultado guiará futuras decisiones arquitectónicas, optimizará las estrategias de asignación de GPU y reducirá los efectos de latencia inherentes al entorno operativo distribuido.”